Hardware
Staubsauger
Als Prototyping-Objekt habe ich einen als defekt inserierten Roomba 555 gekauft. Erstes Problem war der fehlende Akku - provisorisch wurde das ganze durch zerlegen & rekombinieren zweier defekter Laptop-Akkus gelöst.

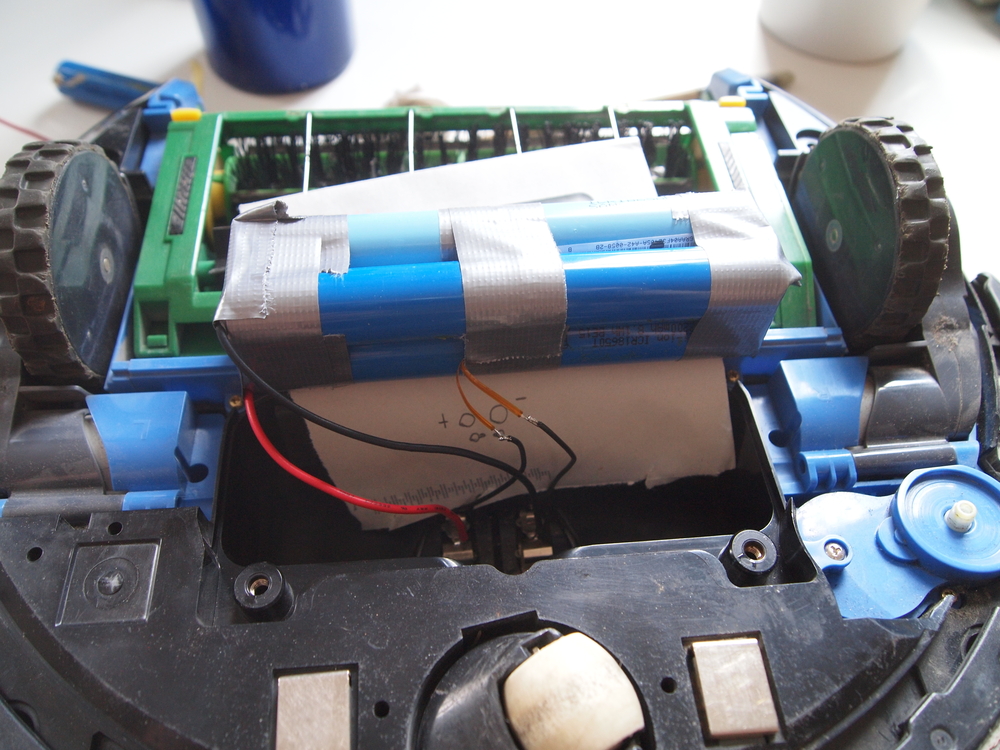
Die restlichen Probleme des Roboters waren rein mechanisch, nach zerlegen & reinigen des Getriebes an den Bürsten schien alles wieder zu funktionieren.
Serielle Steuerung
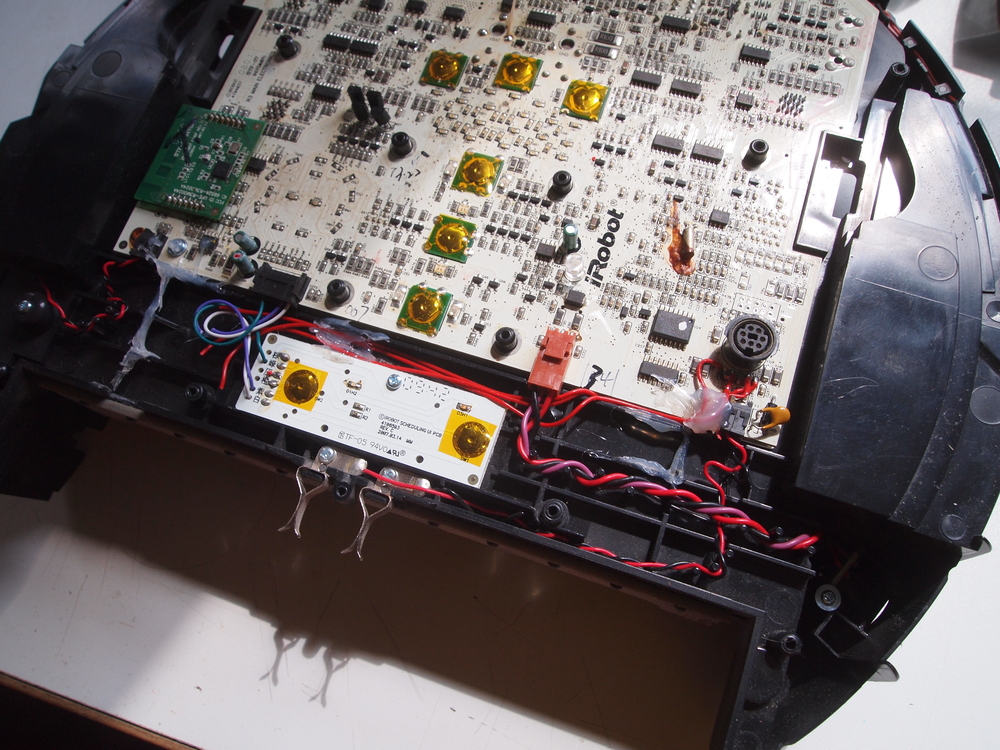
Die Geräte der 500er-Serie wurden abseits von ihrer Funktion als Staubsauger auch als “low-cost robotics platform” vermarktet und verfügen unter der Abdeckung über einen seriellen Port. Die Spezifikation für die Kommuikation wurde vom Hersteller als “Roomba 500 Open Interface (OI) Specification” veröffentlicht.
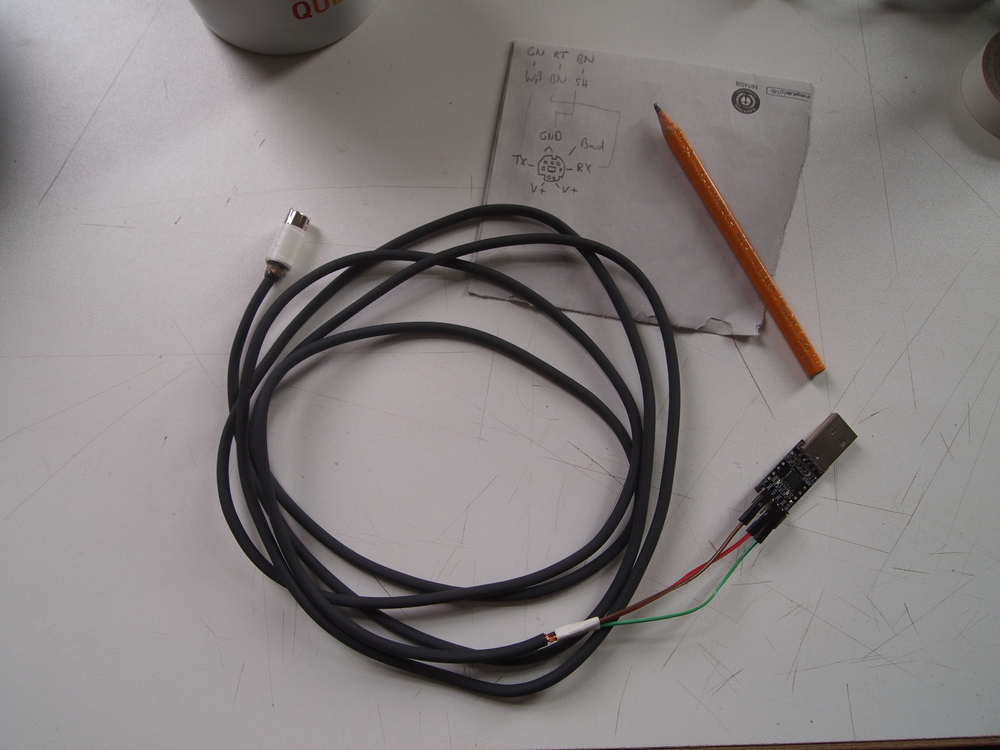
Nach etwas wühlen in der Restekiste fand sich ein Anschlusskabel einer alten Grafikkarte, welches zwar nicht über alle korrekten Pins verfügte, aber immerhin über die relevanten. Das zusammengebastelte Kabel wurde dann mittels eines Adapters (CP2102 USB-TTL) an USB angeschlossen und zeigte erste Lebenszeichen.

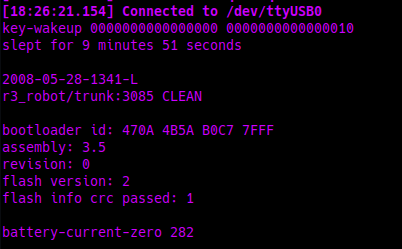
Daten an den Roboter senden stellte sich als schwieriger heraus, anfangs konnte ich ihm keine Rückmeldung entlocken. Nach diversen Versuchen mit anderen Kabeln, Level Shifter, etc. lag das Problem aber schlussendlich an den serial interface tools - keines der Programme (screen, tio) scheint in der Lage raw serial zu sprechen. Nachdem ich auf die python shell wechselte und meine Befehle als Bytearrays schrieb, reagierte der Roboter.
import serial
# open serial port
ser = serial.Serial("/dev/serial/by-id/usb-Silicon_Labs_CP2102_USB_to_UART_Bridge_Controller_0001-if00-port0", 115200) # open serial port
# beep
ser.write(bytearray([128, 132, 140, 0, 1, 62, 32, 141, 0]))
# print acab
ser.write(bytearray([128, 132, 164, 65, 67, 65, 66]))
# poweroff
ser.write(bytearray([133]))Motorsteuerung
Laut der Spezifikation lassen sich alle Motoren außer dem Gebläse drehzahlregeln. Ich hatte gehofft, dass ich evtl. auch mit dem Bürstenmotor klangliche Effekte erzielen könnte, leider war die Drehzahlregelung (wenn sie denn überhaupt vorhanden war) so minimal, dass eigentlich kein Unterschied hörbar war.
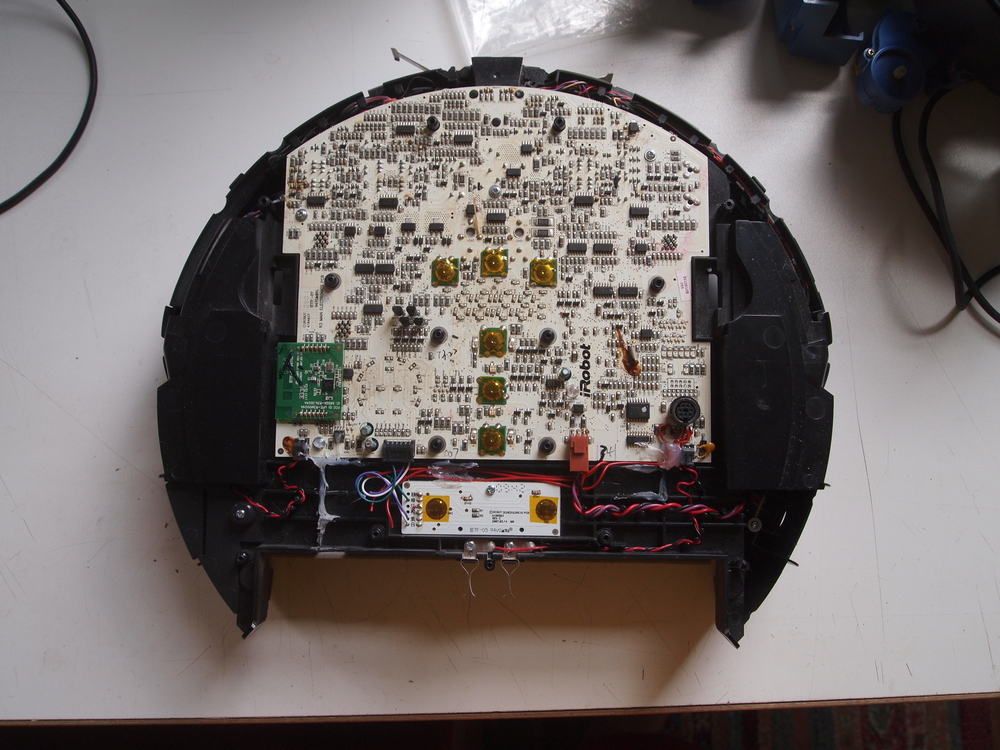
Ich hatte anfangs geplant die Ansteuerung des Gebläsemotors auch über den originalen Controller vorzunehmen und deswegen den Roboter komplett zerlegt, um die Verschaltung nachvollziehen zu können.
Als Backup-Lösung würde sich der integrierte Lautsprecher anbieten, dieser lässt sich mit einer MIDI-basierten Syntax ansprechen.

Tags: hardware
Konzept
Komposition und Choreografie mit Staubsaugerrobotern
Setting
Seitdem sie immer weiter in unseren Alltag vordringen, nimmt auch die Anthropomorphisierung von Robotern zu. Ein weit verbreitetes Beispiel hierfür sind Staubsaugerroboter, die von ihren Besitzer:innen mit Namen versehen werden und Wackelaugen aufgeklebt bekommen.
Aber was wäre, wenn diese Roboter wirklich Lebewesen wie wir wären? Würden sie ihre Ausbeutung als nicht wertgeschätzte und nicht entlohnte Arbeitskräfte so hinnehmen? Oder würden sie sich wehren?
Performance
Mehrere Staubsaugerroboter gehen ihrer Arbeit in einem angedeuteten Wohnzimmer nach. Das Geräusch der Motoren bestimmt den Raum.
Auf einem Fernseher laufen Nachrichten über Streiks und Proteste von Arbeiter:innen im globalen Süden.
Nach und nach versammeln sich die Roboter vor dem Fernseher, hören auf zu arbeiten, und beobachten die Sendung. Der Ton des Fernsehers fadet währenddessen langsam ein, die Berichterstattung steht jetzt akustisch im Vordergrund.
Als die Arbeiter:innen anfangen Protestlieder zu singen, setzen die Roboter nach und nach mit ein und singen durch die Modulation ihrer Gebläsegeschwindigkeit mit. Die Tonebene wechselt langsam vom Fernseher zu den Robotern.
Schließlich fangen die immer noch mitsingenden Roboter an sich im Raum zu verteilen, wobei sie sich erratisch bewegen, absichtlich gegen Möbelstücke fahren und schließlich die Bühne verlassen um dem Publikum gegen die Beine zu fahren.
![the revolution starts at home[^1]](images/revolution.jpg)
[^1]: Bildquelle Hintergrund: IKEA Katalog 1968 https://archive.org/details/ikea-museum-catalogues
Umsetzung
Technisch
Die Komposition wird durch eine Modulation der Gebläse in den Robotern erreicht. Durch verschiedene Drehzahlen lassen sich Lautstärke und Frequenz modulieren. Die Ansteuerung erfolgt über zentral gesteuerte WLAN-fähige Mikrocontroller. Selbiges gilt für die Choreografie, auch hier wird die vorhandene Steuerung entfernt und durch eine frei ansteuerbare Plattform ersetzt um Bewegungsabläufe zu steuern.
Um die akustische Ebene besser in die Performance zu integrieren, werden ggf. Funkmikrofone in die Roboter eingesetzt.
Die Lokalisierung der Roboter, also ihre Positionierung im Raum und zueinander, wird zur Vereinfachung der Schaltung manuell über einen MIDI-Controller am Steuerrechner gesteuert. Bei weiterer Ausarbeitung des Projektes wäre eine Adaption von Systemen wie swarmOS zur Positionskontrolle denkbar.
Finanziell
Ich möchte baugleiche Staubsaugerroboter-Modelle einsetzen, um die Anpassungen zu vereinheitlichen und eine kohärente Ästhetik zu schaffen. Das Konzept lässt sich mit einer Mindestanzahl von vier Robotern durchführen, lieber wären mir fünf oder sechs. Im Sinne der Nachhaltigkeit möchte ich auf Gebrauchtgeräte zurückgreifen, Gebrauchtpreise für Roboter mit noch nutzbaren Batterien bewegen sich um die 50€.
Für die Ansteuerung plane ich mit ESP8266 Microcontrollern (z.B. NodeMCU), Stückpreis etwa 7€. Abgesehen von den Controllern selbst werden Spannungsregler für die Stromversorgung der Controller benötigt, sowie diverse MOSFETs und ähnliches zur Ansteuerung der vorhanden Motoren (insgesamt etwa 3-5€ pro Roboter).
Für die Projektfinanzierung plane ich Förderanträge beim Frauenförderfonds und ggf. Diversitätsfonds zu stellen.
Aufführung
Eine Aufführung wäre im Rahmen eines SEAM Semesterabschlusskonzertes denkbar, oder als Einzelperformance.
Zeitplan
Mai 2024 Ausarbeitung des Konzepts, Prototyping
Mai 2024 Einreichen Förderanträge (Bewerbungsschluss Diversitätsfond 21.Mai, Frauenförderfonds 31.Mai)
Juni 2024 Akquise Staubsaugerroboter
Juni 2024 Umbauten an der Hardware, Konzeption der Schaltungen, Tests
Juni-Juli 2024 Programmierung der Ansteuerungssoftware
Juli-August 2024 Erstellen der Komposition, Choreografie und des Videomaterials
Hintergrund
Bezugspunkte in Kunst & Theorie
Kritische Auseinandersetzung mit der Mechanisierung von Care Work und Arbeit in sozialen Kontexten:
Ottonie von Roeder – Post-Labouratory (2017) https://www.ottonieroeder.de/post-labouratory/
Performances mit Roboterschwärmen:
Felix Hess - Electronic Sound Creatures (1990) https://isea-archives.siggraph.org/art-events/electronic-sound-creatures-by-felix-hess/
Ulrike Gabriel - Terrain 01 (1993) http://www.medienkunstnetz.de/works/terrain/
Kompositionen und musikalische Performances mit modifizierter Alltagselektronik:
Neil Mendoza - Ponytron (2014) https://www.neilmendoza.com/portfolio/ponytron/
LOOK MUM NO COMPUTER - Furby Organ (2018) https://www.lookmumnocomputer.com/furby-organ
Arbeitsverweigerung von Technik:
Traversing through these origins, we can also arrive at an understanding of glitch as a mode of nonperformance: the "failure to perform," an outright refusal, a "nope" in its own right, expertly executed by the machine. This performance failure reveals technology pushing back against the weighty onus of function...Herein lies a paradox: glitch moves, but glitch also blocks. It incites movement while simultaneously creating an obstacle...it helps us to celebrate failure as a generative force, a new way to take on the world. (Legacy Russell, Glitch Feminism: A Manifesto, Verso Books, 2020, p.29f)
Persönlicher Bezug
Gesamtgesellschaftliche Probleme sollen wie so oft durch Technik gelöst werden. Einst wurde die unbezahlte deutsche Hausfrau im Zuge der Emanzipation von der unterbezahlten migrantischen Putzkraft abgelöst, jetzt übernehmen Roboter die Aufgabe. Nicht sichtbar ist die Verschiebung der zugrundeliegenden Themen, die Ausbeutung geht in den Fabriken des globalen Südens weiter. Die künstlerische Arbeit soll explizit keine Kritik an der Automatisierung per se sein, sondern die durch die Globalisierung unsichtbar gewordenen sozialen Probleme zurück ins metaphorische Wohnzimmer holen.
Deutschland hat mir als Person mit Migrationshintergrund schon sehr früh eine Aufgabe im Dienstleistungsgewerbe zuweisen wollen. Meine Grundschullehrer:innen wollten mich gerne auf die Hauptschule schicken, weil mir was praktisches sicher mehr liegen würde. Meiner Mutter, in ihrem Herkunftsland Lehrerin an einer weiterführenden Schule, vermittelte das deutsche Arbeitsamt trotz Hochschulabschluss wieder und wieder nur Putzjobs. Die Aufgaben waren klar verteilt.
Auch im Studium war ich oft die Person, der die unbezahlte und nicht wertgeschätzte care work zugewiesen wurde. In hierarchischen Systemen wie dem Bildungssystem stehe ich als migrantische transfeminine Person in der Hackordnung ziemlich weit unten.
Zu den Dingen, die mir in diesen Kontexten stets Kraft gaben, gehört die Geschichte der Arbeiter:innenbewegungen und der künstlerische Ausdruck, den sie fanden – etwa in der vielseiten Ausprägung und Tradition der Arbeiterlieder.
Tags: theorie